二端子対回路パラメータの相互変換と回転
最近VNAを買ったのを機に高周波回路を勉強していて、Sパラメータとかをこねくり回している。初等的な電子回路の教科書には二端子対回路に関する抽象的な理論が載っているが、これほどちゃんと理解しておけばよかったと思ったことはなかった。
線形な二端子対回路の特性は、Sパラメータを始めとする2x2行列で全て表すことができる。
二端子対回路を特徴づけるパラメータにはSパラメータ(散乱行列)以外にもZ行列、Y行列、F行列などがあり、その内の1つでも把握すれば全てを把握したことになる。しかしそれは何故なのか?相互に変換が可能だが具体的にはどうするのか?その辺をちゃんと調べてみた。
代表的な二端子対回路パラメータ
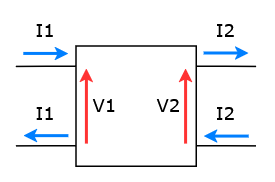
二端子対回路とはこういうやつだ。
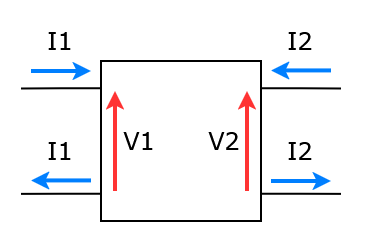
変数として$V_1, V_2, I_1, I_2$の4つがある。つまり自由度が4ある。また回路応答は線形であることが仮定される。
大抵の場合、片方が信号入力で片方が信号出力であり、入出力の間で信号がどのように伝わるかといったことを考察することが目的にある。
そこで、片側に何らかの信号(例えば電圧入力)を入れ、片方を何らかの条件で終端(例えば開放、50Ω終端、短絡など)する。要するに二端子対回路の外側に関する情報を与える。すると式が2つできる。
これで自由度が2減るので、追加でもう2つ式があれば未知数4つが全て決まることが分かる。この2つの線形式が2x2行列で表され、二端子対回路の特性の全てを表す。
最初に与える2つの外部条件は「終端と入力電圧」に限らない。「終端と入力電流」の場合もあるし、「出力電流と入力電圧」や「入出力の電圧」だったりする。とにかく式が全部で4つ必要で、条件として与える値は2つであり、残りの2つがどういう応答をするかを知りたいのである。
ある2つから残りの2つを算出する変換行列は全部で$_4C_2=6$通りある。このうちの5つには名前が付いている。
Z行列: $$\begin{pmatrix}V_1 \\ V_2 \end{pmatrix} = \begin{pmatrix}Z_{11} & Z_{12} \\ Z_{21} & Z_{22} \end{pmatrix} \begin{pmatrix}I_1 \\ I_2 \end{pmatrix}$$
Y行列: Z行列の逆行列 $$\begin{pmatrix}I_1 \\ I_2 \end{pmatrix} = \begin{pmatrix}Y_{11} & Y_{12} \\ Y_{21} & Y_{22} \end{pmatrix} \begin{pmatrix}V_1 \\ V_2 \end{pmatrix}$$
h行列: $$\begin{pmatrix}V_1 \\ I_2 \end{pmatrix} = \begin{pmatrix}h_{11} & h_{12} \\ h_{21} & h_{22} \end{pmatrix} \begin{pmatrix}I_1 \\ V_2 \end{pmatrix}$$
g行列: h行列の逆行列 $$\begin{pmatrix}I_1 \\ V_2 \end{pmatrix} = \begin{pmatrix}g_{11} & g_{12} \\ g_{21} & g_{22} \end{pmatrix} \begin{pmatrix}V_1 \\ I_2 \end{pmatrix}$$
F行列: $$\begin{pmatrix}V_1 \\ I_1 \end{pmatrix} = \begin{pmatrix}F_{11} & F_{12} \\ F_{21} & F_{22} \end{pmatrix} \begin{pmatrix}V_2 \\ -I_2 \end{pmatrix}$$
一般的にF行列の式は電流の向きを一方は逆に定義して書くのだが、ここでは統一的に定義するために右辺をこのように書いてみた。
普通は以下のように書く。
$$\begin{pmatrix}V_1 \\ I_1 \end{pmatrix} = \begin{pmatrix}F_{11} & F_{12} \\ F_{21} & F_{22} \end{pmatrix} \begin{pmatrix}V_2 \\ I_2 \end{pmatrix}$$
$F$行列の逆行列には特に名前は付いていない。左右鏡像で実質同じだからだろう。
Sパラメータ(散乱行列)
電流電圧のみが考察対象ではない。Sパラメータは電圧と電流ではなく エネルギーの伝わる向き を問題にする。
伝送線路理論により、電気信号は配線上を波として伝わる。このとき進む方向次第で2通りの波の成分が存在する。
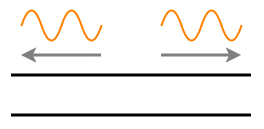
今ここにインピーダンス$Z_0$の伝送線路が左右に伸びているとして、電流の向きを右向き正にとる。右に進む波の電圧振幅を$V_+$、左へ進む波の電圧振幅を$V_-$とすると、電圧と電流の瞬時値は以下のように表せる。
$v(x,t)=V_+ e^{j(\omega t - kx)}+ V_- e^{j(\omega t + kx)}$
$i(x,t)=\frac{V_+}{Z_0} e^{j(\omega t - kx)}- \frac{V_-}{Z_0} e^{j(\omega t + kx)}$
導出については電信方程式などを参照。
$x=0$でフェーザ表示するとシンプルに以下のような式になる。
$V=V_+ + V_-$
$I=\frac{V_+}{Z_0} - \frac{V_-}{Z_0}$
この式から考えて、$Z_0$が決まっているとき、$V_+, V_-$が分かれば$V,I$も一意に決まることが分かる。逆もしかりだ。つまりインピーダンス既知の伝送線路上では、 「電圧と電流の値」が「2つの進行波成分の大きさ」と1対1で対応する 。
したがって線形空間では単なる基底変換になることが分かる。
$$\begin{pmatrix}V \\ I \end{pmatrix} = \begin{pmatrix}1 & 1 \\ 1/Z_0 & -1/Z_0 \end{pmatrix} \begin{pmatrix}V_+ \\ V_- \end{pmatrix}$$
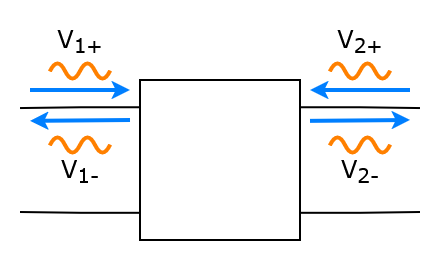
ということは、2端子対回路について議論する際は上で述べたように「$V_1, I_1, V_2, I_2$の内の2つ」を指定する以外に、「2方向×2端子対=4つある進行波成分のうち2つの大きさ」を指定することでも値が確定できる。拘束により自由度が2狭まることには変わりがない。
Sパラメータは各ポートに「入る」向きの波の値から、「出る」向きの波の値を導く行列だ。
$$\begin{pmatrix} V_{1-} \\ V_{2-} \end{pmatrix} = \begin{pmatrix}S_{11} & S_{12} \\ S_{21} & S_{22} \end{pmatrix} \begin{pmatrix}V_{1+} \\ V_{2+} \end{pmatrix}$$
なお、上記の式は「電圧ベースのSパラメータ」と呼ばれるべきものであって、(複素)電力の比を表す電力ベースのSパラメータだと少し定義が変わるらしい。 しかし基準インピーダンスが実数であれば両者は同値になる。大抵の高周波測定器が50Ω系で設計されているのは、実数であることによってその差を気にしなくてよくなるという意味もあるのだろう。
ミクスドモードSパラメータ
2つの信号を差動成分(ディファレンシャルモード)と同相成分(コモンモード)に分けることができる。差動信号について考える場合は差動成分に注目したいので、このような分け方をする。
$a_{d}=\frac{a_1-a_2}{2}$
$a_{c}=\frac{a_1+a_2}{2}$
これもあくまで基底変換であって、情報は失われていないし加えられてもいない。
そして、ポート1・ポート2に対してではなくこの差動成分・同相成分に対してSパラメータを考えることができる。これをミクスドモードSパラメータと呼ぶ。
$$\begin{pmatrix} b_{d} \\ b_{c} \end{pmatrix} = \begin{pmatrix}S_{dd} & S_{dc} \\ S_{cd} & S_{cc} \end{pmatrix} \begin{pmatrix}a_{d} \\ a_{c} \end{pmatrix}$$
4ポート回路を差動2ポート回路と見なすこともできる。
$$\begin{pmatrix} b_{d1} \\ b_{d2} \\ b_{c1} \\ b_{c2} \end{pmatrix} = \begin{pmatrix}S_{dd11} & S_{dd12} & S_{dc11} & S_{dc12} \\ S_{dd21} & S_{dd22} & S_{dc21} & S_{dc22} \\ S_{cd11} & S_{cd12} & S_{cc11} & S_{cc12} \\ S_{cd21} & S_{cd22} & S_{cc21} & S_{cc22} \end{pmatrix} \begin{pmatrix}a_{d1} \\ a_{d2} \\ a_{c1} \\ a_{c2} \end{pmatrix}$$
相互変換
統一的な形にしておくと分かりやすくなる。
Z行列 $$\begin{pmatrix}-1 & Z_{11} & 0 & Z_{12} \\ 0 & Z_{21} & -1 & Z_{22} \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
Y行列 $$\begin{pmatrix}Y_{11} & -1 & Y_{12} & 0 \\ Y_{21} & 0 & Y_{22} & -1 \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
h行列 $$\begin{pmatrix}-1 & h_{11} & h_{12} & 0 \\ 0& h_{21} & h_{22} & -1 \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
g行列 $$\begin{pmatrix} g_{11} & -1 & 0 & g_{12} \\ g_{21} & 0 & -1 & g_{22} \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
F行列: $$\begin{pmatrix} -1 & 0 & F_{11} & -F_{12} \\ 0 & -1 & F_{21} & -F_{22} \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
全ての二端子対回路パラメータの式は2x4行列を使えば同じ形式で表せる。これに対して行基本変形を適用し一方を一方の形に変形すれば、いずれも互いに変換しあえることが分かる。
例えばh行列をF行列に変換してみよう。
- 2行目に$-1/h_{21}$を乗ずる。
$$\begin{pmatrix}-1 & h_{11} & h_{12} & 0 \\ 0 & -1 & -h_{22}/h_{21} & 1/h_{21} \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
- 2行目の$h_{11}$倍を2行目に足す。
$$\begin{pmatrix}-1 & 0 & h_{12}-h_{11}h_{22}/h_{21} & h_{11}/h_{21} \\ 0 & -1 & -h_{22}/h_{21} & 1/h_{21} \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
- 最後にF行列の式と比べる。
$$\begin{pmatrix} -1 & 0 & F_{11} & -F_{12} \\ 0 & -1 & F_{21} & -F_{22} \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
$$F=\begin{pmatrix}h_{12}-h_{11}h_{22}/h_{21} & -h_{11}/h_{21} \\ -h_{22}/h_{21} & -1/h_{21} \end{pmatrix}$$
これで何でも変換できる。
あるいはこう考えて導出することもできる。h行列の2x4行列の
$$\begin{pmatrix}-1 & h_{11} \\ 0& h_{21} \end{pmatrix}$$
の部分を
$$\begin{pmatrix}-1 & 0 \\ 0& -1 \end{pmatrix}$$
という負の単位行列に変換したいので、
$$-\begin{pmatrix}-1 & h_{11} \\ 0& h_{21} \end{pmatrix}^{-1}$$
をかければよい。これでも同じ結果が出る。
Sパラメータの場合
$$\begin{pmatrix}S_{11} & -1 & S_{12} & 0 \\ S_{21} & 0 & S_{22} & -1 \end{pmatrix} \begin{pmatrix}V_{1+} \\ V_{1-} \\ V_{2+} \\ V_{2-} \end{pmatrix} = 0$$
Sパラメータは変数変換を挟むことに注意しなければならない。
$$\begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = \begin{pmatrix}1 & 1 \\ 1/Z_0 & -1/Z_0 \\ & & 1 & 1 \\ & & 1/Z_0 & -1/Z_0 \end{pmatrix} \begin{pmatrix}V_{1+} \\ V_{1-} \\ V_{2+} \\ V_{2-} \end{pmatrix}$$
$$\begin{pmatrix}V_{1+} \\ V_{1-} \\ V_{2+} \\ V_{2-} \end{pmatrix} = \begin{pmatrix}1/2 & Z_0/2 \\ 1/2 & -Z_0/2 \\ & & 1/2 & Z_0/2 \\ & & 1/2 & -Z_0/2 \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix}$$
ためしにSパラメータをY行列に変換してみよう。
$$\begin{pmatrix}S_{11} & -1 & S_{12} & 0 \\ S_{21} & 0 & S_{22} & -1 \end{pmatrix} \begin{pmatrix}V_{1+} \\ V_{1-} \\ V_{2+} \\ V_{2-} \end{pmatrix} = 0$$
$$\begin{pmatrix}S_{11} & -1 & S_{12} & 0 \\ S_{21} & 0 & S_{22} & -1 \end{pmatrix} \begin{pmatrix}1/2 & Z_0/2 \\ 1/2 & -Z_0/2 \\ & & 1/2 & Z_0/2 \\ & & 1/2 & -Z_0/2 \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
$$\frac{1}{2}\begin{pmatrix}S_{11}-1 & S_{11}Z_0+Z_0 & S_{12} & S_{12}Z_0 \\ S_{21} & S_{21}Z_0 & S_{22}-1 & S_{22}Z_0+Z_0 \end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
Y行列の式と同じ形にするには2列・4列を負の単位行列に変換したい。
2列・4列は
$$\begin{pmatrix}S_{11}Z_0+Z_0 & S_{12}Z_0 \\ S_{21}Z_0 & S_{22}Z_0+Z_0 \end{pmatrix}$$
なので、
$$-\begin{pmatrix}S_{11}Z_0+Z_0 & S_{12}Z_0 \\ S_{21}Z_0 & S_{22}Z_0+Z_0 \end{pmatrix}^{-1}=-\frac{1}{Z_0}(S+U)^{-1}$$
を全体に乗ずる。$U$は単位行列。
乗算後の1列・3列の値は
$$\left(-\frac{1}{Z_0}\right)(S+U)^{-1}\begin{pmatrix}S_{11}-1 & S_{12} \\ S_{21} & S_{22}-1 \end{pmatrix}$$ $$=\left(-\frac{1}{Z_0}\right)(S+U)^{-1}(S-U)$$ $$=\frac{1}{Z_0}(U+S)^{-1}(U-S)$$
となり、よく教科書に載っている式と一致する。なお、$(U+S)^{-1}(U-S)$は可換なので順序はどちらでも問題ない。
回転
全てではないが多くの二端子対回路において、リターンパス部分は共通の回路節点になっている。π型回路やT型回路がそうだし、トランジスタの○○接地増幅回路も代表的な例だ。

このような回路は二端子対回路としての電圧電流の情報を与えれば、三端子回路網としても完全な電圧電流の情報を持つことが分かる。
と考えると、リターンパス共通の二端子対回路は三端子回路網と考えて回転させることができるはずだ。
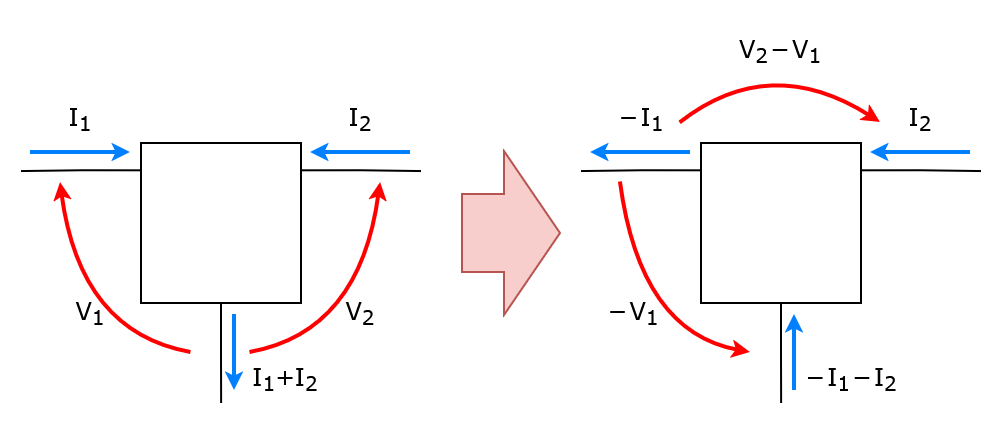
$$\begin{pmatrix}V_{2} - V_{1} \\ I_2 \\ -V_1 \\ -I_1-I_2 \end{pmatrix} = \begin{pmatrix} -1 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ -1 & 0 & 0 & 0 \\ 0 & -1 & 0 & -1\end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix}$$
回転後のZパラメータ
試しに、回転させた2端子対回路のZ行列を計算してみよう。
$$\begin{pmatrix}-1 & Z_{11} & 0 & Z_{12} \\ 0 & Z_{21} & -1 & Z_{22} \end{pmatrix} \begin{pmatrix} -1 & 0 & 1 & 0 \\ 0 & 0 & 0 & 1 \\ -1 & 0 & 0 & 0 \\ 0 & -1 & 0 & -1\end{pmatrix} \begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
$$\begin{pmatrix}1 & -Z_{12} & -1 & Z_{11}-Z_{12} \\ 1 & -Z_{22} & 0 & Z_{21}-Z_{22} \end{pmatrix}\begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
$$\begin{pmatrix} -1 & Z_{22} & 0 & Z_{22}-Z_{21} \\ 0 & Z_{22}-Z_{12} & -1 & Z_{11}-Z_{12}-Z_{21}+Z_{22} \end{pmatrix}\begin{pmatrix}V_1 \\ I_1 \\ V_2 \\ I_2 \end{pmatrix} = 0$$
回転後のZ行列はこのようになることが分かった。
$$Z_{rot}=\begin{pmatrix} Z_{22} & Z_{22}-Z_{21} \\ Z_{22}-Z_{12} & Z_{11}-Z_{12}-Z_{21}+Z_{22} \end{pmatrix}$$
$$=\begin{pmatrix} 0 & 1 \\ -1 & 1 \end{pmatrix} Z \begin{pmatrix} 0 & -1 \\ 1 & 1 \end{pmatrix}$$
回転したπ型回路のZ行列
これで本当に上手くいっているのだろうか?
試しにπ型回路のZ行列を計算してみよう。π型回路は実質的にΔ結線なので、回転させれば3つの抵抗が互いに入れ替わるだけになるはずだ。
$$Z=\begin{pmatrix} \frac{R_1(R_2+R_3)}{R_1+R_2+R_3} & \frac{R_1 R_3}{R_1+R_2+R_3} \\ \frac{R_1 R_3}{R_1 + R_2+R_3} & \frac{R_3(R_1 + R_2)}{R_1 + R_2+R_3} \end{pmatrix}$$
$$Z_{rot}=\begin{pmatrix} 0 & 1 \\ -1 & 1 \end{pmatrix} Z \begin{pmatrix} 0 & -1 \\ 1 & 1 \end{pmatrix}$$
$$=\begin{pmatrix} \frac{R_3(R_1 + R_2)}{R_1 + R_2+R_3} & \frac{R_3 R_2}{R_1+R_2+R_3} \\ \frac{R_3 R_2}{R_1+R_2+R_3} & \frac{R_2(R_3 + R_1)}{R_1 + R_2+R_3} \end{pmatrix}$$
式を見れば分かるように、3つの抵抗値が順に入れ替わっていることが分かる。この計算は有効そうだ。
回転後のSパラメータ
Sパラメータの場合も考えてみよう。
一度Z行列に変換して回転させて戻せばいいはずだ。まずZ行列に変換する。
$$Z = Z_0 (U+S)(U-S)^{-1}$$
回転させる。
$$Z_{rot} = B Z_0 (U+S)(U-S)^{-1} C^{-1}$$
ただし $B,C$を以下のように置く。
$$B = \begin{pmatrix}0 & 1 \\ -1 & 1 \end{pmatrix}$$
$$C = \begin{pmatrix}1 & 1 \\ -1 & 0 \end{pmatrix}$$
Sパラに戻す。
$$S_{rot}=(Z_{rot}-Z_0 U)(Z_{rot} + Z_0 U)^{-1}$$
$$=(B Z_0 (U+S)(U-S)^{-1} C^{-1} - Z_0 U)(B Z_0 (U+S)(U-S)^{-1} C^{-1} + Z_0 U)^{-1}$$
$$=(B (U+S)(U-S)^{-1} C^{-1} - U)(B (U+S)(U-S)^{-1} C^{-1} + U)^{-1}$$
$$=(B (U+S) - C(U-S))(B (U+S) + C(U-S))^{-1}$$
$$=((B+C)S + (B-C))((B-C)S + (B+C))^{-1}$$
$$S_{rot}=\left(\begin{pmatrix} 1 & 2 \\ -2 & 1 \end{pmatrix}S + \begin{pmatrix} -1 & \\ & 1 \end{pmatrix}\right)\left(\begin{pmatrix} -1 & \\ & 1 \end{pmatrix}S+\begin{pmatrix} 1 & 2 \\ -2 & 1 \end{pmatrix}\right)^{-1} $$
これが回転させたSパラメータになる。
回転したπ型回路のSパラメータ
Z行列と同様にπ型回路で検証してみる。
一般のπ型回路のSパラメータの式は資料などを探しても見当たらなかったので、計算して出してみた。導出は割愛する。
$$S=U - \frac{2Z_0^2(R_1+R_2+R_3)}{\Delta} U+\frac{2Z_0}{\Delta} \begin{pmatrix} -R_3(R_1+R_2) & R_1 R_3 \\ R_1 R_3 & -R_1(R_2+R_3) \end{pmatrix} $$
ただし
$$\Delta = R_1 R_2 R_3 +Z_0^2 (R_1 + R_2 + R_3) + Z_0(2R_1 R_3 + R_2(R_1 + R_3))$$
$U$は単位行列。
これを回転させてみる。
計算は本当に長大すぎるので機械に任せた。
$$ S_{rot}=\left(\begin{matrix} \frac{R_1 R_2 R_3-R_1 Z_0^2-R_2 Z_0^2-R_3 Z_0^2+R_1 R_2 Z_0-R_1 R_3 Z_0}{R_1 R_2 R_3+R_1 Z_0^2+R_2 Z_0^2+R_3 Z_0^2-R_1 R_2 Z_0-R_1 R_3 Z_0-2 R_2 R_3 Z_0} & \frac{-2 R_2 R_3 Z_0}{R_1 R_2 R_3+R_1 Z_0^2+R_2 Z_0^2+R_3 Z_0^2-R_1 R_2 Z_0-R_1 R_3 Z_0-2 R_2 R_3 Z_0} \\ \frac{-2 R_2 R_3 Z_0}{R_1 R_2 R_3+R_1 Z_0^2+R_2 Z_0^2+R_3 Z_0^2-R_1 R_2 Z_0-R_1 R_3 Z_0-2 R_2 R_3 Z_0} & \frac{R_1 R_2 R_3-R_1 Z_0^2-R_2 Z_0^2-R_3 Z_0^2-R_1 R_2 Z_0+R_1 R_3 Z_0}{R_1 R_2 R_3+R_1 Z_0^2+R_2 Z_0^2+R_3 Z_0^2-R_1 R_2 Z_0-R_1 R_3 Z_0-2 R_2 R_3 Z_0} \end{matrix}\right) $$
$$ = U - \frac{2 Z_0^2 (R_1 + R_2 + R_3) }{\Delta_{rot}} U + \frac{2Z_0}{\Delta_{rot}}\begin{pmatrix} R_2(R_1+R_3) & -R_2 R_3 \\ -R_2 R_3 & R_3(R_1+R_2) \end{pmatrix}$$
ただし
$$\Delta_{rot}=R_1 R_2 R_3 +Z_0^2 (R_1 + R_2 + R_3) + Z_0(2R_2 R_3 + R_1(R_2 + R_3))$$
これは確かに$R_1, R_2, R_3$が順繰りに交換されていることが分かる。
おわり
二端子対回路と仲良くなりたくて書いた。
個々の回路パラメータ行列に関する考察はよく教科書に載っているが統一的な書き方をしている資料は見当たらなかったので、ごり押しで書いてみた。
特に回転周りは参考になる資料が見当たらないまま書いたので、先行研究があれば確認したい。さすがにあると思うのだが、見つけられなかった。